KOU-Mekatronom
Introduction
Hello, the KOU-Mekatronom team was founded in 2019 with the purpose of participating in competitions focused on autonomous vehicles. I joined the university team in 2022, and continued as the active team captain until 2025. Currently, I serve as an advisor to the university team, working to ensure the continuation and growth of the next generation.
Competitions I Participated In
- Teknofest Robotaxi (2022, 2023) – Ranked 19th & 6th among university teams in Turkey
- Teknofest Robotaxi Mentor (2024)
- Bosch Future Mobility Challenge (2024) – Only Turkish team among 160 international applicants, finalist top-24 in Cluj, Romania
Competition Details
- The Robotaxi competition at Teknofest is the most comprehensive autonomous vehicle competition organized in Turkey. You can watch a related video here.
- Bosch Future Mobility Challenge, an international autonomous RC car competition organized by Bosch.
Algorithm Details
Below are reference videos for the Robotaxi and Bosch Future Mobility Challenge competitions, showcasing the algorithms used.
Bosch Future Mobility Challenge:
Qualification video

Click the image to watch the video on YouTube.
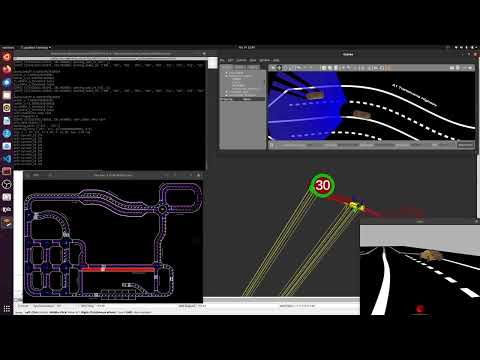
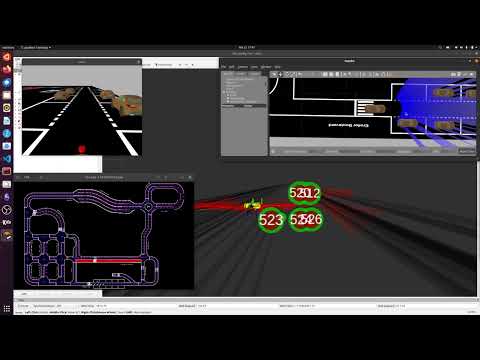
Full part video all of the algorithms and the working shows in simulation
Obstacle_detector, djikstra, mpc and obstacle_avoidance, obstacle detecion, traffic sign detection shows in here
Click the image to watch the video on YouTube.
Parking algorithm real life with obstacle detection from car view
Its shows the parking part in real life from car view.

Click the image to watch the video on YouTube.
Parking algorithm with obstacle detection in simulation
We have the real life coordinat of the parking points. If obstacle detected we are changing the goal position. The simulation Video explain how does it work.
Click the image to watch the video on YouTube.
Full part video all of the algorithms and the working shows in simulation
Obstacle_detector, djikstra, mpc and obstacle_avoidance, obstacle detecion, traffic sign detection shows in here
Click the image to watch the video on YouTube.
The video series shows all of the videos which has been recorded.
Have fun!
Click the image to watch the video on YouTube.
Robotaxi Competition:
This is the video of the real-size autonomous vehicle we competed with in 2023. Since it was our first year, we used more fundamental approaches such as OpenCV, YOLO, and basic motor control to drive the vehicle. As a result, we were ranked 6th. github page.

Click the image to watch the video on YouTube.